【2025年12月30日】
EtherCAT技術憑藉高速傳輸、低延遲、高同步性與靈活且高擴展性的菊花鏈與節點分岐拓樸,成為人形機器人與靈巧手設計的關鍵技術。
EtherCAT技術憑藉高速傳輸、低延遲、高同步性與靈活且高擴展性的菊花鏈與節點分岐拓樸,成為人形機器人與靈巧手設計的關鍵技術。
全球人形機器人的成長動能,主要來自人口老化與勞動力短缺,推升醫療照護與服務型機器人的需求;智慧製造與工業4.0的浪潮,更帶動工廠對高自由度協作型機器人的渴求。隨著AI演算法成熟、感測器技術突破,以及高效能運算平台普及,人形機器人展現出更自然的動作、更精細的操作能力與更高的自主性,成為智慧工廠、醫療照護及危險環境的最佳解決方案。EtherCAT技術憑藉高速傳輸、低延遲、高同步性與靈活且高擴展性的菊花鏈(Daisy Chain)與節點分岐拓樸,成為人形機器人與靈巧手設計的關鍵技術。
在人形機器人設計中,工程師需兼顧靈活運動、多軸協同、精準控制與即時回饋,才能重現自然動作並完成精細操作。其中,靈巧手是最具挑戰性的子系統,需在有限空間內重現複雜結構,並整合驅動、感測與通訊模組。每根手指由伺服馬達或微型致動器協同運作,可精細調整抓握力,既能穩固持重物,也能輕柔操作易碎品。靈巧手同時整合壓力、溫度與滑動感測器,提供觸覺回饋,支援電子組裝與醫療輔助等精密任務。EtherCAT技術確保多指動作即時協同,並支援模組化設計,提升維護與擴展效率。結合AI與邊緣運算,靈巧手能即時調整策略,在人機互動中展現更自然的協作。
(圖一) 人形機器人與靈巧手智慧製造應用情境
高自由度與多軸協同:確保數十至上百個自由度的馬達同步運作,避免延遲或不協調。
即時反應與高精度控制:EtherCAT微秒級通訊週期支撐多軸馬達精準控制。
多感測器整合:整合IMU(慣性測量單元)、力矩、壓力、溫度與視覺模組,支援即時演算與決策。
靈巧手精細操作:多伺服馬達或微型驅動器協同控制,兼顧穩固握持與輕柔操作。
觸覺回饋:壓力、滑動與溫度感測器提供即時觸覺資訊,提升互動精度。
模組化設計:EtherCAT菊花鏈拓撲簡化布線,支援多模組快速整合與擴展。
安全與可靠性:錯誤檢測、冗餘路徑與安全協定確保高風險場景下的穩定性。
智慧化互動:結合AI與邊緣運算,即時調整操作策略,提升人機協作自然度。
綜合而言,人形機器人與靈巧手本質上是高靈活度、多模組、多感測器協同運作的複雜系統。EtherCAT技術憑藉低延遲、高同步性、模組化支持與安全機制,成為理想的工業級通訊骨幹。它能確保多軸馬達與多指動作即時協同,支援大量模組串接,同步傳輸控制指令、感測數據與安全訊號,並有效降低系統複雜度。缺乏高速通訊,人形機器人難以展現自然流暢的動作;缺乏即時回饋,靈巧手也無法完成精細操作。因此,EtherCAT已成為人形機器人全身運動控制的最佳解決方案。
隨著人形機器人與智慧製造的快速發展,市場對高效通訊與精密控制的需求持續攀升。亞信電子推出AX58400 EtherCAT從站雙核微控制器,以雙核心架構結合EtherCAT技術,兼具高整合度、小型封裝與多元介面支援,能在空間受限的設計中提供穩定可靠的運算與通訊基礎,成為人形機器人與靈巧手應用的理想核心方案。

(圖二) 亞信AX58400 EtherCAT從站雙核微控制器:人形機器人與靈巧手產品應用
雙核心架構分工:Cortex M7專注於應用控制、多軸馬達與感測器回饋;Cortex M4負責EtherCAT工業通訊。兩者互不干擾,確保即時性與可靠性,並有效縮短整體週期時間,提升運動控制的靈敏度與精準度。
高整合ESC微控制器:將高效能雙核微控制器、ESC、雙高速乙太網路PHY與大容量Flash整合於13×13mm BGA封裝中,減少外部器件需求,特別適合空間受限的靈巧手與人形機器人關節設計。
大容量記憶體配置:內建2MB Dual Bank Flash與1MB SRAM,可支援複雜的馬達控制與即時演算需求。
小型封裝設計:採用TFBGA封裝,提升散熱效率,同時降低PCB空間與硬體成本。
精準馬達驅動:支援高分辨率計時器、PWM、ADC與增量編碼器,可精準控制多軸馬達,並整合視覺、觸覺、壓力與力矩感測器。
多元介面支援:提供乙太網路MAC、USB 2.0 OTG、SPI/UART/I2C/CANFD等,滿足智慧製造與機器人多樣化需求。
通訊安全保障:搭載AES/TDES/HASH/HMAC硬體加密引擎,並具備ROP/PCROP/Anti tamper技術,確保資料與韌體安全。
可靠性與安全性:雙核架構搭配故障檢測與保護機制,支援EtherCAT冗餘設計,並結合靈活的EtherCAT節點分岐設計,滿足人形機器人高安全性需求。
低功耗設計:提供多種低功耗電源管理模式,有效降低能耗並延長續航力,適合長時間運作的服務型與工業應用。
模組化擴展能力:可作為關節或手指模組核心,透過EtherCAT拓樸快速串接,支援多模組協同,便於系統擴展與維護。
亞信電子的「AxRobot EtherCAT七軸助力控制機器手臂解決方案」內建馬達助力控制器,可即時偵測異常扭力並判斷突發碰撞,迅速停機以保障人員安全。此方案採用模組化馬達驅動設計,縮減關節驅動板空間並降低硬體成本,並透過EtherCAT菊花鏈拓樸簡化通訊連接,減少線路複雜度與維護難度,特別適合人型機器人與協作型機器人。同時,AX58400具備高分辨率計時器與多通道PWM,可精準驅動靈巧手的手指關節,支援多自由度協同控制並整合多組I/O與感測器,確保手部動作自然流暢。透過EtherCAT高速通訊同步觸覺回饋與控制指令,雙核架構更能同時支援控制演算法與AI邊緣推論,即時提供智慧化反饋。其高整合度設計讓模組更精簡,降低PCB空間與成本,同時維持效能與穩定性,為人形機器人與靈巧手提供安全、精準且高效的技術基礎。

(圖三) 意法半導體STM32 MCU軟體開發工具
亞信電子AX58400 EtherCAT從站雙核微控制器,採用基於意法半導體STM32H755的系統級封裝(SiP),在硬體架構上兼具高效能與高整合度,並與STM32 MCU完整生態系統相容,為人形機器人與靈巧手設計帶來顯著優勢。透過此結合,設計團隊可快速完成從原型到量產的全流程。
AX58400支援STM32Cube、Keil、IAR等主流開發環境,工程師能迅速上手,並利用即時除錯、模擬與韌體更新工具縮短開發週期。同時,STM32生態系統提供EtherCAT、馬達控制與感測器驅動等軟體套件,開發者可透過STM32馬達控制開發套件直接套用範例程式,快速建立人形機器人關節或靈巧手模組。再加上STM32全球龐大的開發者社群,提供論壇、技術文件與開源專案,設計團隊能即時獲得支援,降低開發風險。透過成熟的STM32生態系統,團隊無需從零開發通訊協定或控制演算法,大幅減少人力與時間成本,加速產品上市。綜合而言,AX58400結合STM32 MCU生態系統,憑藉工具、軟體、社群與模組化支援的多重優勢,使人形機器人與靈巧手產品能快速完成設計、驗證與量產,不僅縮短研發週期,也降低成本與風險,為產業商業化落地提供強大助力。
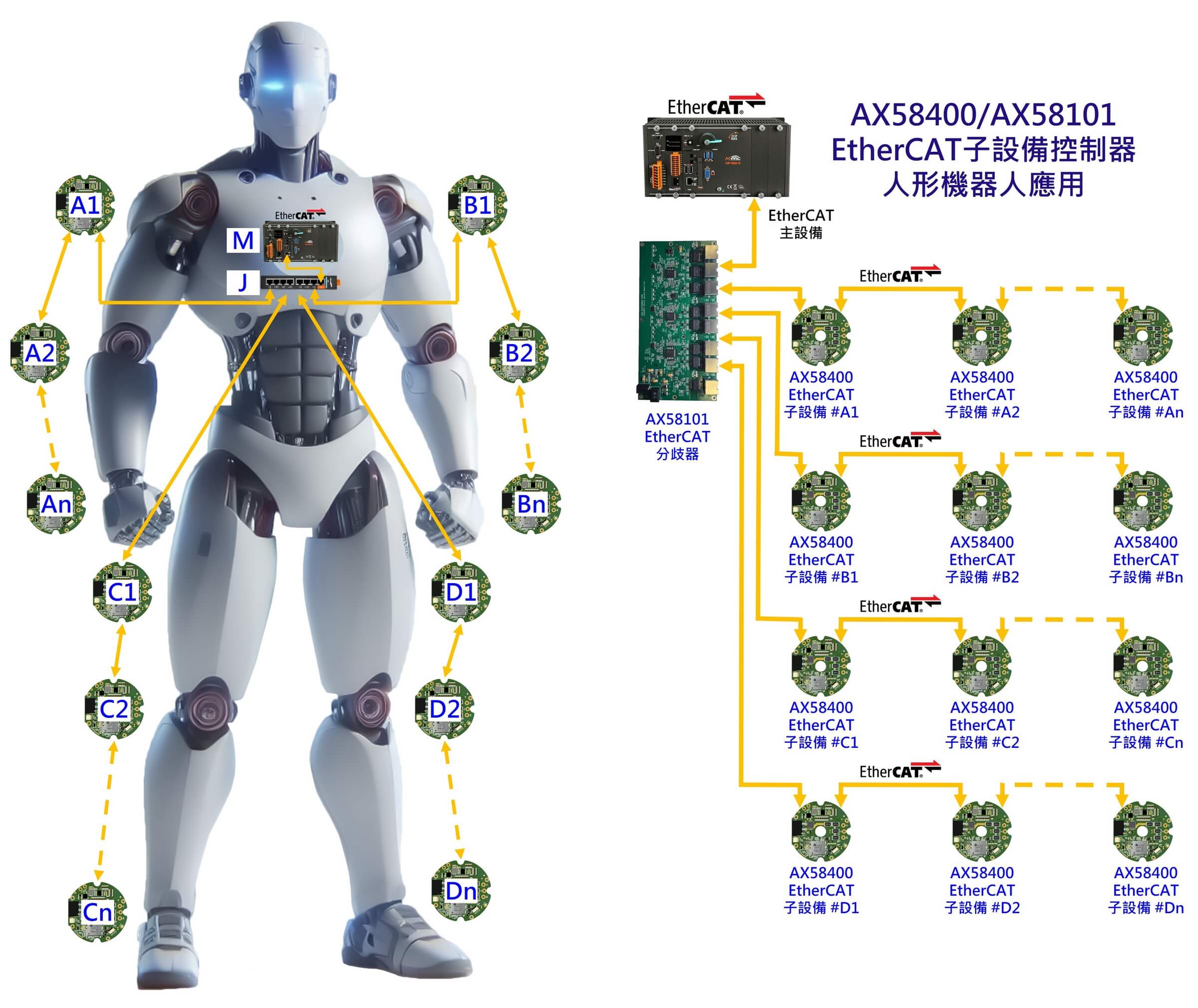
(圖四) AX58101人形機器人應用:EtherCAT節點分岐拓樸架構
AX58101是一款高整合度的4埠EtherCAT子設備控制器(ESC),內建雙高速乙太網路PHY與雙MII介面,並支援埠0與埠2的互換功能,能靈活滿足各種網路拓樸需求。在市場主流的8埠EtherCAT分歧器設計中,僅需3顆AX58101搭配2顆外接PHY,即可輕鬆完成設計;相較於傳統方案至少需要6顆EtherCAT晶片與6顆外接PHY,能有效降低硬體成本並縮減PCB空間。
在人形機器人應用中,AX58101可作為EtherCAT分歧器,搭配中央EtherCAT主設備與多組AX58400子設備,建構高效模組化通訊架構,即時精準地控制頭部、手部、腳部與靈巧手等多軸馬達。各子設備可獨立驅動多組馬達,並整合視覺、觸覺、壓力與力矩感測器,提供即時回饋,讓動作更自然流暢。此架構結合菊花鏈與節點分歧混合拓樸,模組可依需求靈活串接,簡化布線並提升維護效率。
為提升系統的可靠性與安全性,亞信電子另外提供AX58101 EtherCAT節點分歧拓樸冗餘設計功能,可將分支末端回接至分歧器另一埠,形成環狀通訊路徑。當路徑斷線時,系統能自動切換至備援通道,確保通訊不中斷,特別適合高風險或複雜地形環境下的人形機器人應用。此外,高階人形機器人系統亦可配置多個EtherCAT主設備,分別負責不同部位的即時控制,進一步提升整體運動協調性與環境適應能力。綜合而言,AX58101所建構的EtherCAT節點分歧拓樸,不僅支援多模組並行運作,更透過分歧冗餘與多主設備架構,全面強化系統的安全性、可靠性與擴展性,成為人形機器人通訊與驅動的理想技術基礎。
人形機器人與靈巧手的設計,是智慧製造與人工智慧領域的重要挑戰,也是推動「物理AI」不可或缺的一環。隨著市場需求快速成長,系統必須同時兼顧靈活運動、多軸協同、即時回饋與高度安全。EtherCAT技術憑藉高速傳輸、低延遲、高同步性與優異擴展能力,已成為工業通訊的核心。
亞信電子AX58400雙核微控制器整合通訊與控制,具備低功耗與安全機制,並相容STM32 MCU生態系統,能加速設計到量產流程,特別適合靈巧手等精密模組。AX58101分歧器則以高整合度設計降低成本與PCB空間,並支援菊花鏈與分歧混合拓撲及冗餘機制,提升系統可靠性與安全性。綜合而言,AX58400與AX58101共同打造高效能、可靠且可擴展的通訊與驅動解決方案,不僅提升人形機器人與靈巧手的價值,更協助客戶快速推向市場,成為智慧製造與「物理AI」的重要技術基礎。