Dec. 30th, 2025
EtherCAT technology, with its high-speed transmission, low latency, synchronization, and scalable daisy-chain and junction topologies, is a critical technology for humanoid robot and dexterous hand design.
EtherCAT technology, with its high-speed transmission, low latency, synchronization, and scalable daisy-chain and junction topologies, is a critical technology for humanoid robot and dexterous hand design.
The growth momentum of humanoid robots primarily stems from population aging and labor shortages, driving demand for medical care and service-oriented robots. The wave of smart manufacturing and Industry 4.0 has further fueled factories’ desire for high-degree-of-freedom collaborative robots. As AI algorithms mature, sensor technologies advance, and high-performance computing platforms become widely adopted, humanoid robots are achieving more natural movements, enhanced precision, and greater autonomy—positioning them as optimal solutions for smart factories, healthcare, and hazardous environments. EtherCAT technology, with its high-speed transmission, low latency, synchronization, and scalable daisy-chain and junction topologies, is a critical technology for humanoid robot and dexterous hand design.
In humanoid robot design, engineers must balance flexible movement, multi-axis coordination, precise control, and real-time feedback to reproduce natural motions and accomplish fine operations. Among these, the dexterous hand is the most challenging subsystem, requiring the recreation of complex structures within limited space while integrating actuation, sensing, and communication modules. Each finger, driven by servo motors or miniature actuators, can finely adjust gripping force—capable of securely holding heavy objects while gently handling fragile items. The dexterous hand also integrates pressure, temperature, and sliding sensors to provide tactile feedback, supporting precision tasks such as electronic assembly and medical assistance. EtherCAT technology ensures real-time coordination of multi-finger actions and supports modular design, enhancing maintenance and scalability. Combined with AI and edge computing, the dexterous hand can dynamically adjust strategies, enabling more natural collaboration in human–robot interaction.
Figure-1. Humanoid Robot and Dexterous Hand Smart Manufacturing Application Scenario
In summary, humanoid robots and dexterous hands are inherently complex systems characterized by high flexibility, multi-module integration, and multi-sensor coordination. Leveraging low latency, strong synchronization, modular support, and robust safety mechanisms, EtherCAT has become the ideal industrial-grade communication backbone. It ensures real-time coordination of multi-axis motors and finger movements, supports extensive module chaining, synchronizes control commands, sensor data, and safety signals, while effectively reducing system complexity. Without high-speed communication, humanoid robots cannot achieve natural and fluid motion; without real-time feedback, dexterous hands cannot perform fine operations. Thus, EtherCAT has emerged as the optimal solution for full-body motion control in humanoid robots.
With the rapid advancement of humanoid robots and smart manufacturing, demand for efficient communication and precise control continues to grow. ASIX introduces the AX58400 EtherCAT slave controller with a dual-core MCU, combining EtherCAT technology and dual-core architecture. Featuring high integration, compact packaging, and versatile interface support, it provides a stable and reliable platform for computation and communication in space-constrained designs—making it an ideal solution for humanoid robots and dexterous hands.

Figure-2. AX58400 EtherCAT Slave Dual-Core MCU: Humanoid Robot and Dexterous Hand Applications
ASIX AxRobot EtherCAT 7-Axis Force-Assisted Control Robot solution integrates a motor assist controller capable of real-time abnormal torque detection and collision recognition, enabling rapid shutdown to ensure operator safety. The solution adopts a modular motor drive design to reduce joint driver board space and lower hardware costs. With EtherCAT daisy-chain topology, communication is simplified, minimizing wiring complexity and maintenance effort—particularly suitable for humanoid and collaborative robots. The AX58400 features high-resolution timers and multi-channel PWM to precisely drive finger joints of dexterous hands, supporting multi-DOF coordinated control and integrating multiple I/O and sensors to ensure natural and smooth hand movements. Through EtherCAT high-speed communication, tactile feedback and control commands are synchronized, while the dual-core architecture simultaneously supports control algorithms and AI edge inference, providing intelligent real-time feedback. Its high level of integration makes modules more compact, reduces PCB space and cost, and maintains performance and stability, delivering a safe, precise, and efficient technological foundation for humanoid robots and dexterous hands.

Figure-3. STMicroelectronics STM32 MCU Software Development Tools
The AX58400 EtherCAT slave controller with a dual-core MCU adopts a system-in-package (SiP) based on STMicroelectronics’ STM32H755 microcontroller, delivering both high performance and high integration in its hardware architecture. Fully compatible with the STM32 MCU ecosystem, it provides significant advantages for humanoid robot and dexterous hand designs, enabling design teams to efficiently complete the entire process from prototyping to mass production.
AX58400 supports mainstream development environments such as STM32Cube, Keil, and IAR, enabling engineers to quickly get started and leverage real-time debugging, simulation, and firmware update tools to shorten development cycles. Meanwhile, the STM32 ecosystem further offers software packages for EtherCAT, motor control, and sensor drivers. Developers can directly apply sample programs from the STM32 motor control development kit to rapidly build humanoid robot joints or dexterous hand modules. In addition, STM32’s global developer community offers forums, technical documentation, and open-source projects, allowing design teams to access immediate support and reduce development risks. With this mature ecosystem, teams no longer need to develop communication protocols or control algorithms from scratch, significantly reducing manpower and time costs while accelerating time-to-market.
In summary, by integrating the AX58400 with the STM32 MCU ecosystem—leveraging tools, software, community support, and modular design—humanoid robot and dexterous hand products can be rapidly designed, validated, and mass-produced. This not only shortens R&D cycles but also reduces costs and risks, providing a solid foundation for industrial commercialization.
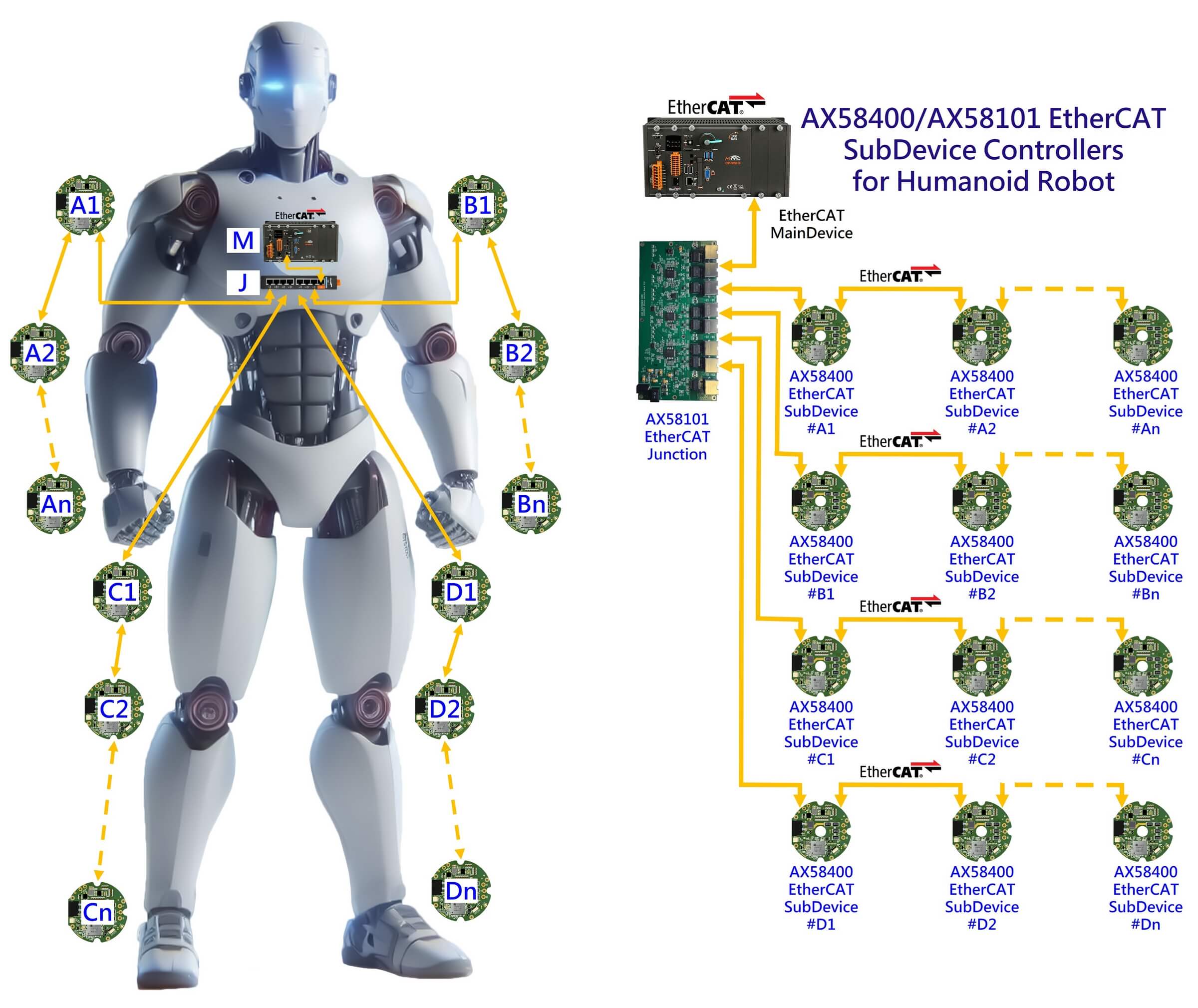
Figure-4. AX58101 Humanoid Robot Application: EtherCAT Junction Topology
The AX58101 is a highly integrated 4-port EtherCAT subdevice controller (ESC) featuring dual Fast Ethernet PHYs and dual MII interfaces. It supports port swapping between ESC port 0 and port 2, offering flexible options to meet diverse network topology requirements. In mainstream 8-port EtherCAT junction designs, only three AX58101 chips combined with two external PHYs are sufficient to complete the design with ease. Compared with traditional solutions that typically require at least six EtherCAT chips and six external PHYs, the AX58101 significantly reduces hardware costs and PCB space.
In humanoid robot applications, the AX58101 serves as an EtherCAT junction, working with a central EtherCAT MainDevice and multiple AX58400 EtherCAT SubDevices to establish a high-performance modular communication architecture. This configuration enables precise, real-time control of multi-axis motors in the head, arms, legs, and dexterous hands. Each SubDevice can independently drive multiple motors while integrating vision, tactile, pressure, and torque sensors to deliver immediate feedback, resulting in smoother and more natural movements. By combining EtherCAT daisy-chain and junction hybrid topologies, the architecture allows flexible module connections, simplifies wiring, and improves maintenance efficiency.
To further enhance system reliability and safety, ASIX offers an AX58101 EtherCAT junction redundancy design. Branch endpoints can be looped back to another junction port, forming a ring communication path. In the event of a link failure, the system automatically switches to the backup channel, ensuring uninterrupted communication—particularly important in high-risk or complex environments. In advanced humanoid robot systems, multiple EtherCAT MainDevices can be deployed, each managing real-time control of different body parts to improve motion coordination and adaptability. In summary, the EtherCAT junction topology enabled by AX58101 not only supports parallel multi-module operation but also strengthens safety, reliability, and scalability through redundancy and multi-MainDevices architecture, making it an ideal foundation for humanoid robot communication and drive solutions.
The design of humanoid robots and dexterous hands represents a major challenge in smart manufacturing and artificial intelligence, and is an indispensable step in advancing ‘Physical AI’. With rapidly growing market demand, systems must simultaneously ensure flexible motion, multi-axis coordination, real-time feedback, and high safety. Leveraging high-speed transmission, low latency, strong synchronization, and excellent scalability, EtherCAT technology has become the core of industrial communication.
The AX58400 dual-core microcontroller integrates both communication and control functions, offering low power consumption and built-in safety mechanisms. Fully compatible with the STM32 MCU ecosystem, it provides comprehensive tools and technical support to accelerate the transition from design to mass production, making it particularly well-suited for precision modules such as dexterous hands. Meanwhile, the AX58101 junction solution employs a highly integrated design to reduce hardware costs and PCB footprint, while supporting hybrid daisy-chain and junction topologies with redundancy features to further enhance system reliability and safety. Overall, the AX58400 and AX58101 jointly deliver a high-performance, reliable, and scalable communication and drive solution. This not only increases the value of humanoid robots and dexterous hands but also helps customers bring products to market more quickly, establishing a solid technological foundation for smart manufacturing and “Physical AI”.