The AX58400 EtherCAT slave motor control reference design kit also includes complete software and firmware source codes, as well as software design guides. Designers can utility these technical resources and tutorial videos to quickly set up the AX58400 development environment, and begin verifying the hardware functionality of the new AX58400 device. If the new AX58400 device is functioning correctly, designers can then begin customizing the source codes based on the product requirements. These source codes include bootloader, application firmware, and TwinCAT PLC applications. The following outlines the software design process for AX58400 EtherCAT slave motor control products:
a. Compile the AX58400 bootloader source code using the ARM KEIL MDK uVision 5 development tool, then flash it onto the new AX58400 device with the STM32CubeProgrammer tool.
b. Generate the EtherCAT SSC source code using Beckhoff EtherCAT SSC tool; compile the AX58400 EtherCAT slave motor control firmware source code using STM32CubeIDE or ARM KEIL MDK uVision 5 development tools, and then flash the new firmware onto the new AX58400 device with STM32CubeIDE or STM32CubeProgrammer tools.
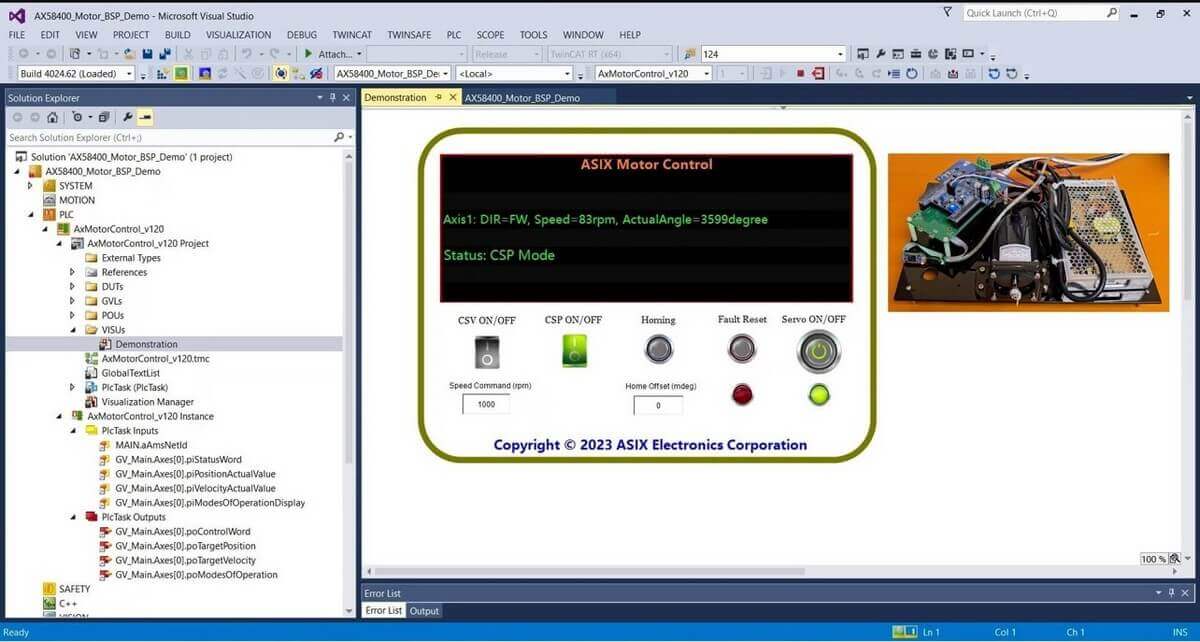
c. Create a new TwinCAT project using the Beckhoff TwinCAT 3 XAE development tool, import and build the AX58400 motor control TwinCAT PLC demo application source code. Run the demo application to flash the EEPROM, and start verifying the motor control functionality of the new AX58400 device.
d. After verifying the functionality of the AX58400 device, designers can begin customizing the source codes based on the product requirements.